
රොබෝ කෙනෙක් නිර්මාණය කරද්දී රොබෝගේ මෝටර්වල වේගය අඩු වැඩි කරන්න අවශ්ය වෙනවා. මේ ලිපියෙන් විස්තර කරන්නේ ඒ සදහා පාවිච්චි කරන්න පුළුවන් මූලධර්මයක් ගැනයි.
මෝටරයක් කැරකෙන වේගය, ඊට බාහිරව ලැබෙන වෝල්ටීයතාව අනුව තමයි මූලිකව රදාපවතින්නේ. මේ ප්රස්ථාරයෙන් ඒක පැහැදිලි වෙනවා.

Vmax කියන්නේ මෝටරයක් පිච්චෙන්නේ නැතිව සපයන්න පුළුවන් උපරිම වොල්ටීයතාවයි. Vmin කියන්නේ මෝටරයක් කැරකෙන්න අවශ්ය කරන අවම වෝල්ටීයතාවයි.

Vmax කියන්නේ මෝටරයක් පිච්චෙන්නේ නැතිව සපයන්න පුළුවන් උපරිම වොල්ටීයතාවයි. Vmin කියන්නේ මෝටරයක් කැරකෙන්න අවශ්ය කරන අවම වෝල්ටීයතාවයි.
සාමාන්ය ඇනලොග් පරිපථයක නම් අපිට අවශ්ය විචල්ය වෝල්ටීයතාවක් පහසුවෙන් හදාගන්න පුළුවන්. හැබැයි ඩිජිටල් පරිපථයක පාවිච්චි වෙන්නේ වෝල්ටීය අවස්ථා 2 ක් (High, Low) පමණක් නිසා අපිට ඕන වොල්ටීයතාවක් කෙලින්ම ලබාගන්න බෑ. ඉතින් මේකට පොඩි උපක්රමයක් පාවිච්චි කරන්න වෙනවා.
12 V බැටරියකින් මෝටරයක් කරකවන අවස්ථාවක් සලකමු.
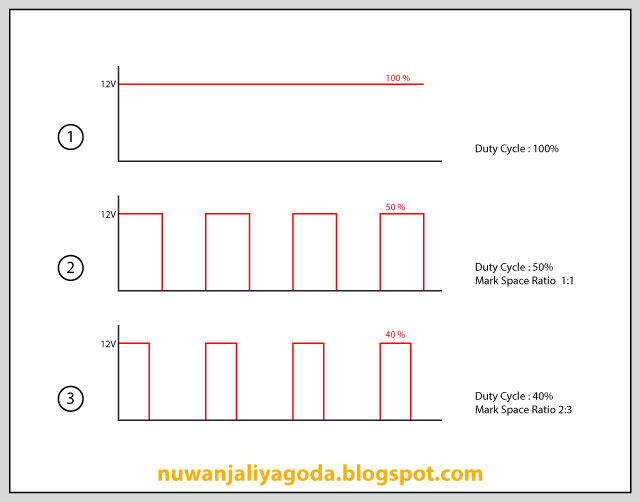
12 V දිගටම ලබාදුන්නොත් මෝටරය එහි උපරිම වේගයෙන් කැරකෙනවා. දෙවන සටහනේ විදිහට කඩින් කඩ විදුලිය ලබාදෙන අවස්ථාවක් සලකමු. මෝටරයට 12 V, ලබාදුන්නාම මෝටරය කැරකෙන්න පටන්ගන්නවා. හැබැයි මෝටරය එහි උපරිම වේගයට එන්න කලින් ආයෙත් විදුලි බලය කපා හැරෙනවා. ඒ නිසා ආයෙත් වේගය අඩු වෙනවා. හැබැයි සම්පූර්ණයෙන්ම අඩුවෙන්න කලින් ආයෙත් විදුලිය ලැබෙන නිසා ආයෙත් වේගය වැඩි වෙනවා. මේ ක්රියාවලිය ඉතා වේගයෙන් සිදුකලොත් මෝටරයේ වේගය අඩු වැඩිවීම අපිට නොදැනෙන තරම් ඉක්මණින් සිදුවෙනවා. ඒ නිසා මෝටරය නියත වේගයකින් කැරකෙනවා වගේ පේනවා.
මෝටරය කැරකෙන වේගය තීරණය වෙන්නේ ඊට වෝල්ටීයතාව ලැබෙන හා නොලැබෙන කාල අතර අනුපාතය අනුවයි. උදාහරණයක් විදිහට මේ කාල අනුපාතය 1:1 නම් මෝටරය කැරකෙන්නේ එහි උපරිම වේගයෙන් 50% ක වේගයකින්. අනුපාතය 2:3 නම් වේගය 40% වෙනවා. ( 2/(2+3) * 100% = 40%, 3 සටහන)
මේ කාල පරාස අතර අනුපාතය, Mark Space Ratio නමින් හදුන්වනවා. කැමති නම් මෝටරයට ලැබෙන වෝල්ටීයතාවයේ සාමාන්යය අගය (Average Voltage) ගණනය කරලා මෝටරයට ලැබෙන වෝල්ටීයතාව හොයන්න පුළුවන්.
මේ මූලධර්මයේදී සංඥා පළල අනුව ප්රතිදානය සැකසෙන නිසා මේ ක්රමයට හදුන්වන්නේ Pulse width modulation කියනවා. කෙටියෙන්; PWM
මේ වෙනකොට මෝටර් සම්බන්ධයෙන් න්යායාත්මක කරුණු ගොඩක් සාකච්ඡා කරලයි තියෙන්නේ. මීළග ලිපියෙන් මෝටර් පාලන පරිපථ (Motor Drive Circuit) ගැන තමයි කථා කරන්නේ.
Motor Drive එකක් හදන්න බලාපොරොත්තු වෙන අය මේ දේවල් ටික දැන්ම ලෑස්ති කරගෙන තියාගන්න.
- Vero board / Breadboard
- L298 IC
- Terminal Headers
- 4 x Diodes
- Circuit wires
මීළග ලිපියෙන් හමුවෙමු. සුබ සතියක්....
No comments :
Post a Comment